
 产品:47
产品:47
 联系我们
联系我们

库卡机器人控制系统通过测量工具(工具坐标系)识别工具顶尖( TCP-Tool CenterPoin,t 工具中心点)相对于法兰中心点的位置, TCP的测量有两种途径:一种是找个固定的参考点进行示教, 另一种则是已知工具的各参数,就可以得到相对于法兰中心点的 X、Y、Z 的偏移量,相对于法兰坐标系转角(角度 A、B、C),同样也能得出**的 TCP。
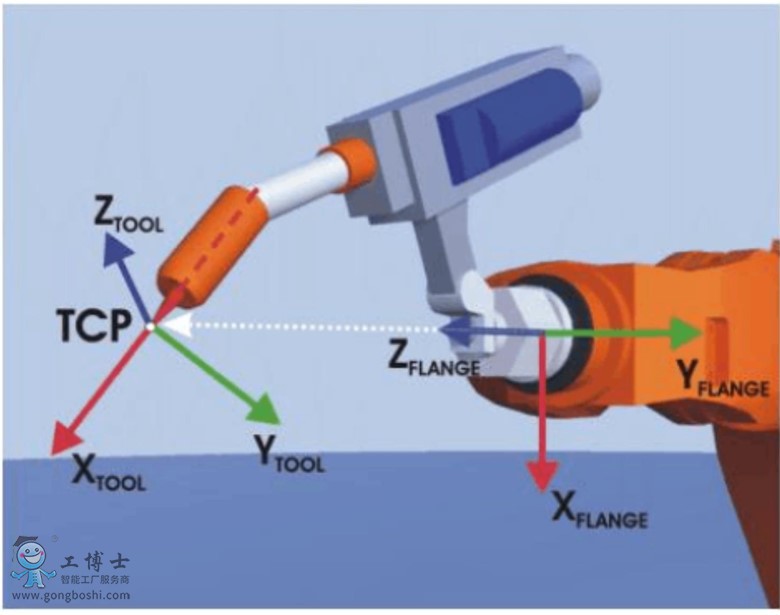
图 8-8
通过一个固定参考点的工具坐标系的测量分为 2 步:首先确定工具坐标系的 TCP点,然
后确定工具坐标系的姿态如表 8-7 所示。表 8-7 TCP的测量的步骤
步骤 说明
确定工具坐标系的 TCP点
1 可选择以下方法:
*XYZ 4 点法
*XYZ 参照法
确定工具坐标系的姿态
2 可选择以下方法:
*ABC 2 点法
*ABC 世界坐标法
通过一个固定参考点的工具坐标系的测量分为 2 步:首先确定工具坐标系的 TCP点,然
后确定工具坐标系的姿态如表 8-7 所示。表 8-7 TCP的测量的步骤
步骤 说明
确定工具坐标系的 TCP点
1 可选择以下方法:
*XYZ 4 点法
*XYZ 参照法
确定工具坐标系的姿态
2 可选择以下方法:
*ABC 2 点法
*ABC 世界坐标法
更多信息请点击:库卡机器人