
 产品:47
产品:47
 联系我们
联系我们

kuka机器人有四种操作模式:$T1(手动慢)、$T2(手动快)、$AUT(自动)和$EXT(外部自动)。本文将介绍外部自动化,首先在机器人的配置如下:

$为脉冲起始信号;
$为[12]的操作信号和开仓信号;
$in[13]是一个错误确认信号;
$为驱动设备的连接信号;
$in[15]为驱动器关机信号;
WVIO映射:
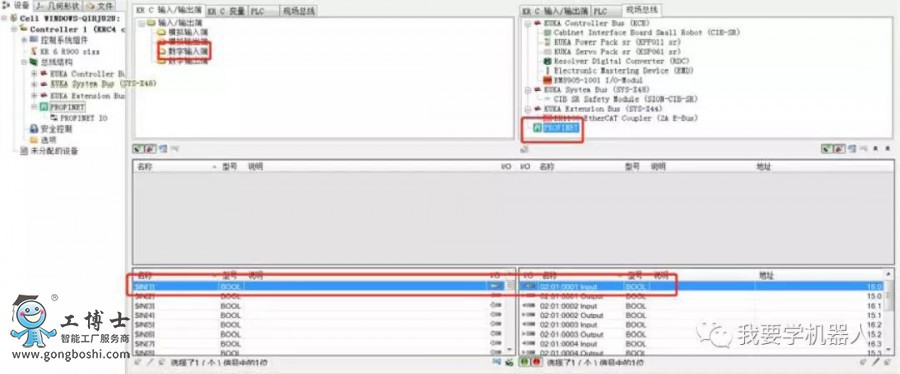
输入输出映射表:

PLC配置:
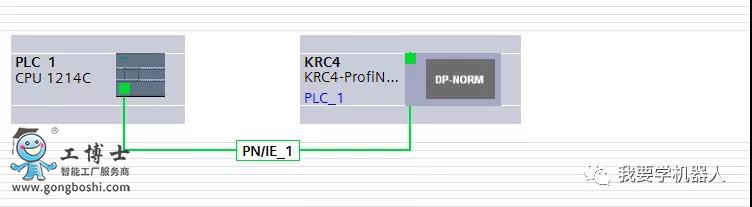
在profine通信协议的情况下,添加一个32DI/DO信号,输入地址为ib60-63,输出地址为qb60-63。
PLC程序:
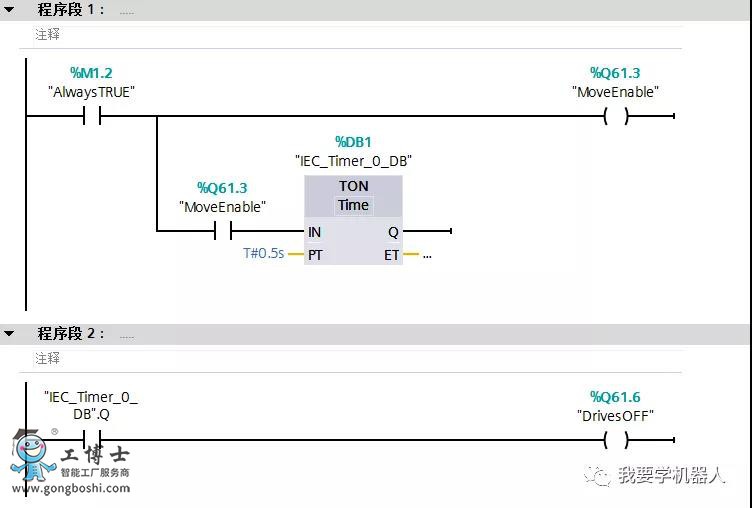
过程描述:将机器人切换到EXT模式,PLC一接通电源就给出使能信号,0.5秒后机器人司机发出信号,0.5秒后连接驱动装置。当机器人接收到驱动装置的连接信号时,它将反馈给PLC其中一个驱动装置处于待机状态,此时需要断开机器人驱动装置的连接信号。然后按下开始按钮启动机器人。
当所有的准备工作完成后,可以通过外部按钮启动机器人。
注意:你不能使用机器人训练器上的开始按钮来启动机器人。
- 下一篇:库卡机器人过程和配置的外部的自动运行模式
- 上一篇:库卡机器人如何调整PLC